











六軸機器人是哪六個軸怎么區分呢?
發布時間 : 2021-04-17 瀏覽次數 : 次六(liu)(liu)軸(zhou)(zhou)(zhou)(zhou)(zhou)工業機(ji)(ji)器(qi)人(ren):六(liu)(liu)軸(zhou)(zhou)(zhou)(zhou)(zhou)機(ji)(ji)械(xie)手臂(bei)、6關節機(ji)(ji)械(xie)手、6軸(zhou)(zhou)(zhou)(zhou)(zhou)機(ji)(ji)械(xie)臂(bei)、機(ji)(ji)器(qi)手臂(bei)等等都是它的稱呼,工業機(ji)(ji)器(qi)人(ren)一(yi)般是指四軸(zhou)(zhou)(zhou)(zhou)(zhou)、五軸(zhou)(zhou)(zhou)(zhou)(zhou)、六(liu)(liu)軸(zhou)(zhou)(zhou)(zhou)(zhou)機(ji)(ji)械(xie)手。每個(ge)機(ji)(ji)器(qi)人(ren)的關節結構會(hui)有(you)不同,下(xia)面(mian)海智講解一(yi)下(xia)六(liu)(liu)軸(zhou)(zhou)(zhou)(zhou)(zhou)機(ji)(ji)器(qi)人(ren)是哪六(liu)(liu)個(ge)軸(zhou)(zhou)(zhou)(zhou)(zhou),我(wo)們(men)怎么區(qu)別它的軸(zhou)(zhou)(zhou)(zhou)(zhou)數?(附六(liu)(liu)軸(zhou)(zhou)(zhou)(zhou)(zhou)機(ji)(ji)器(qi)人(ren)示意圖(tu))
一軸(zhou)(zhou)--本體回轉軸(zhou)(zhou),它是連接底座的(de)部位,是工業機器人承載較(jiao)大的(de)軸(zhou)(zhou),可以左(zuo)右旋(xuan)轉動作,類似磨(mo)盤的(de)動作方(fang)式(shi)。
二軸(zhou)(zhou)--主臂前后擺(bai)動(dong)軸(zhou)(zhou),是(shi)機器人部件的核心連接位置,承上啟下的用處(chu)。
三軸(zhou)(zhou)--三軸(zhou)(zhou)和(he)二軸(zhou)(zhou)的(de)動(dong)(dong)作功能(neng)相(xiang)似(si),也是控(kong)制機器人上(shang)下料(liao)擺動(dong)(dong)功能(neng),三軸(zhou)(zhou)位(wei)置的(de)動(dong)(dong)作相(xiang)對較小。
四軸--它是(shi)工業(ye)機器人上面(mian)的(de)圓(yuan)管軸位置(zhi)的(de)部分,可自由回轉(zhuan),就是(shi)一個圓(yuan)柱體的(de)旋(xuan)轉(zhuan)只是(shi)里面(mian)多了(le)個線(xian)纜(lan)的(de)限制(zhi)。
五(wu)軸--這個位置相(xiang)當(dang)是(shi)人手臂(bei)中(zhong)手腕的關節,可以上下小(xiao)幅度動(dong)作,是(shi)產品抓取后可以使產品或者(zhe)固(gu)定的工具進行翻(fan)轉的動(dong)作。
六(liu)軸--末(mo)端旋轉軸,是在后面進行微調位置的關節;可以(yi)360°旋轉

上圖是(shi)海智(zhi)六軸機(ji)器人示意圖-每個(ge)關(guan)(guan)節(jie)軸都有(you)標(biao)注,注明有(you)區分6軸機(ji)器人機(ji)械(xie)手(shou)(shou)的(de)關(guan)(guan)節(jie)軸位(wei)置所在,運動位(wei)置,每個(ge)軸的(de)位(wei)置都有(you)一(yi)個(ge)電機(ji)和減(jian)速機(ji),總(zong)共是(shi)六個(ge)電機(ji)和六個(ge)減(jian)速機(ji)組成核心的(de)六軸機(ji)器人本體(ti),再配上電控箱(xiang)系統就(jiu)是(shi)一(yi)臺六軸機(ji)械(xie)手(shou)(shou)了。現在你(ni)知道六軸機(ji)器人是(shi)哪六個(ge)軸了嗎?通過上面的(de)介紹就(jiu)可以區分六軸機(ji)械(xie)手(shou)(shou)的(de)關(guan)(guan)節(jie)。
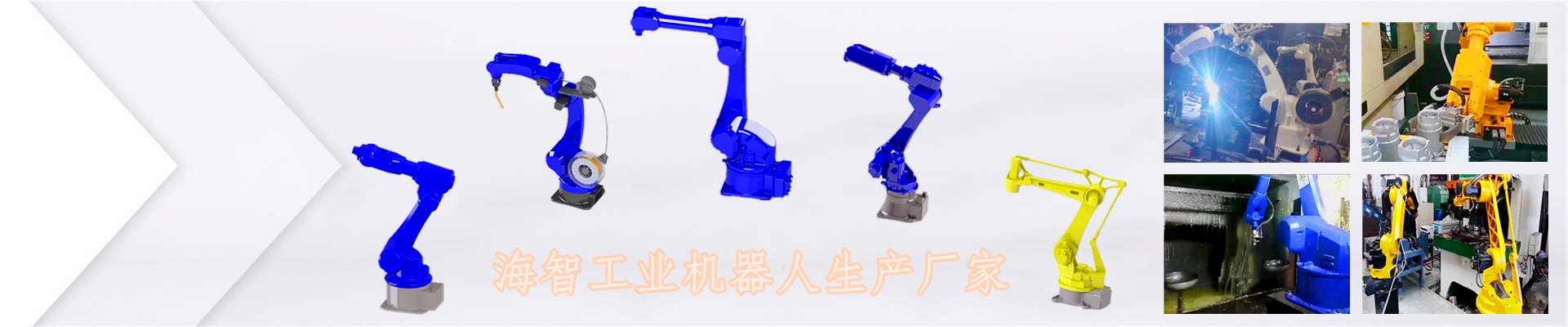
在六(liu)關節機械(xie)手(shou)的(de)應(ying)用(yong)中(zhong)通常是在末端六(liu)軸法(fa)蘭(lan)位置(zhi)安(an)裝(zhuang)其它的(de)工(gong)具或者夾具來達(da)到(dao)生產(chan)(chan)中(zhong)所需(xu)要自動化改造(zao)的(de)項目(mu)目(mu)的(de),通過夾具夾持(chi)產(chan)(chan)品機器人做(zuo)動作可(ke)以完成產(chan)(chan)品的(de)搬(ban)運;通過六(liu)軸法(fa)蘭(lan)固定焊接或者噴(pen)涂(tu)的(de)工(gong)具即:焊槍、噴(pen)槍那(nei)么就可(ke)以做(zuo)焊接六(liu)軸機器人應(ying)用(yong)和噴(pen)涂(tu)六(liu)軸機器人應(ying)用(yong)項目(mu)了。



上圖是(shi)六軸機(ji)器(qi)(qi)人(ren)焊接、機(ji)床(chuang)上下料以及(ji)噴(pen)涂機(ji)器(qi)(qi)人(ren)應用案例,需要工業機(ji)器(qi)(qi)人(ren)改造自動化(hua)生(sheng)產線歡迎(ying)咨詢(xun)海(hai)智機(ji)器(qi)(qi)人(ren),我們(men)是(shi)一家專業的工業機(ji)器(qi)(qi)人(ren)生(sheng)產廠家!




